Chang Won (John) Lee
Hi there! I'm a Master's student at the University of Toronto, advised by Professor Steven Waslander
in the Toronto Robotics and AI Lab.
I am affiliated with University of Toronto Robotics Institute and
Vector Institute.
I obtained my Bachelor's degree in Engineering Science (Machine Intelligence major) from the University of Toronto.
My research lies at the intersection of machine learning, computer vision, and robotics.
My previous and current work focuses on object detection, uncertainty quantification, multi-object tracking, and visual anomaly detection for autonomous driving and space robotics.
Going forward, I am interested in exploring visual representation learning, generative modeling, multi-modal perception and 3D scene understanding.
CV
Github
G. Scholar
LinkedIn
Please don't hesitate to reach out if you have any questions or would like to chat!
john [dot] lee [at] robotics [dot] utias [dot] utoronto [dot] ca
Master of Applied Science in Aerospace Engineering and Robotics
University of Toronto
September 2023 - September 2025 (Expected)
Advisor: Professor Steven Waslander
Bachelor of Applied Science in Engineering Science (Machine Intelligence)
University of Toronto
September 2018 - June 2023
Thesis Advisor: Professor Steven Waslander
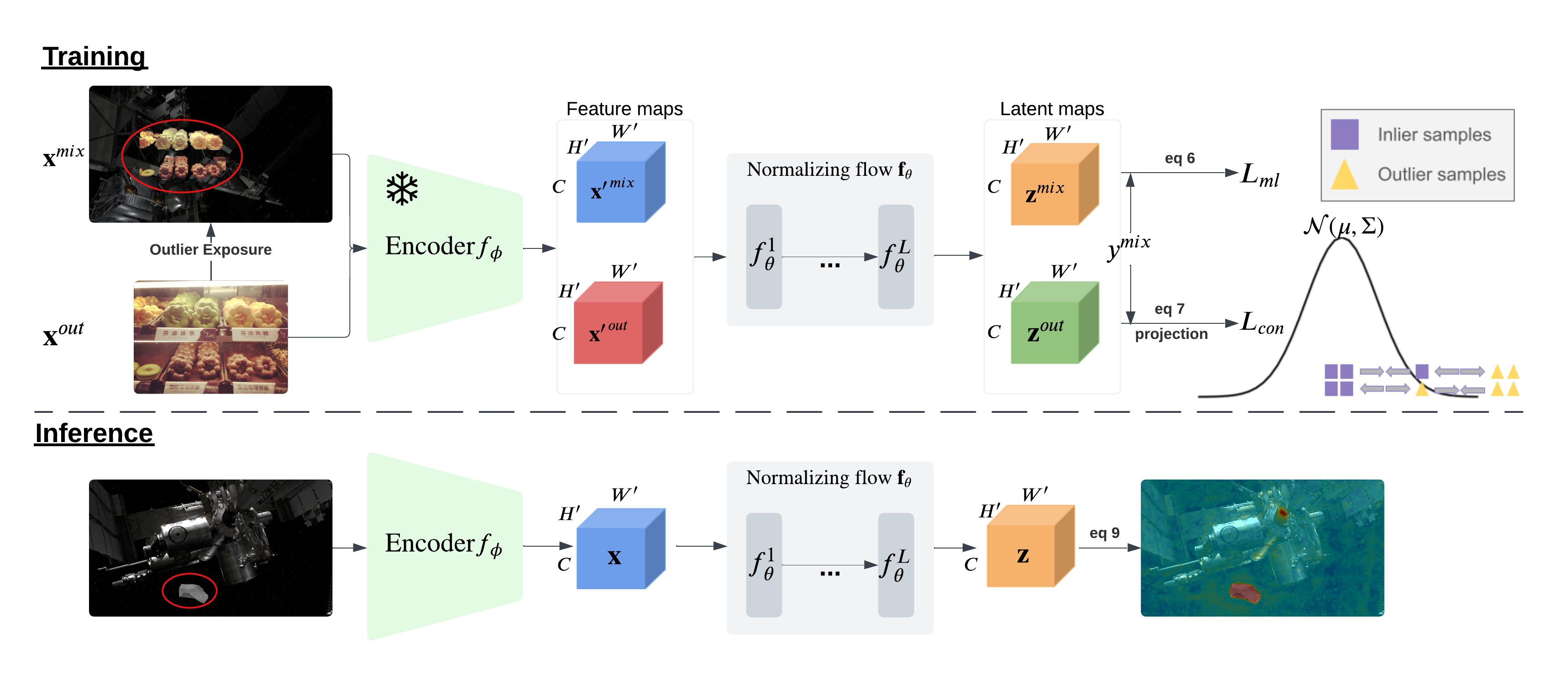
FlowCLAS: Enhancing Normalizing Flow Via Contrastive Learning For Anomaly Segmentation
Chang Won Lee, Selina Leveugle, Svetlana Stolpner, Chris Langley, Paul Grouchy, Jonathan Kelly, Steven L. Waslander
Under Review
Paper
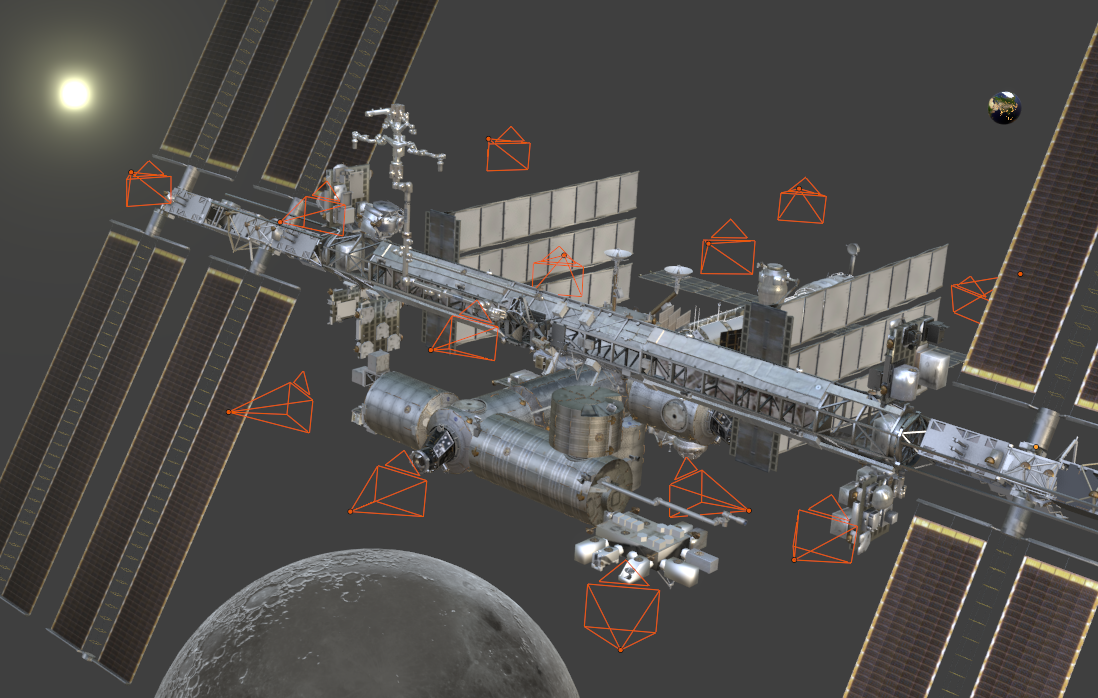
ALLO: A Photorealistic Dataset and Data Generation Pipeline for Anomaly Detection During Robotic Proximity Operations in Lunar Orbit
Selina Leveugle, Chang Won Lee, Svetlana Stolpner, Chris Langley, Paul Grouchy, Steven Waslander, Jonathan Kelly
Under Review
Paper •
Code
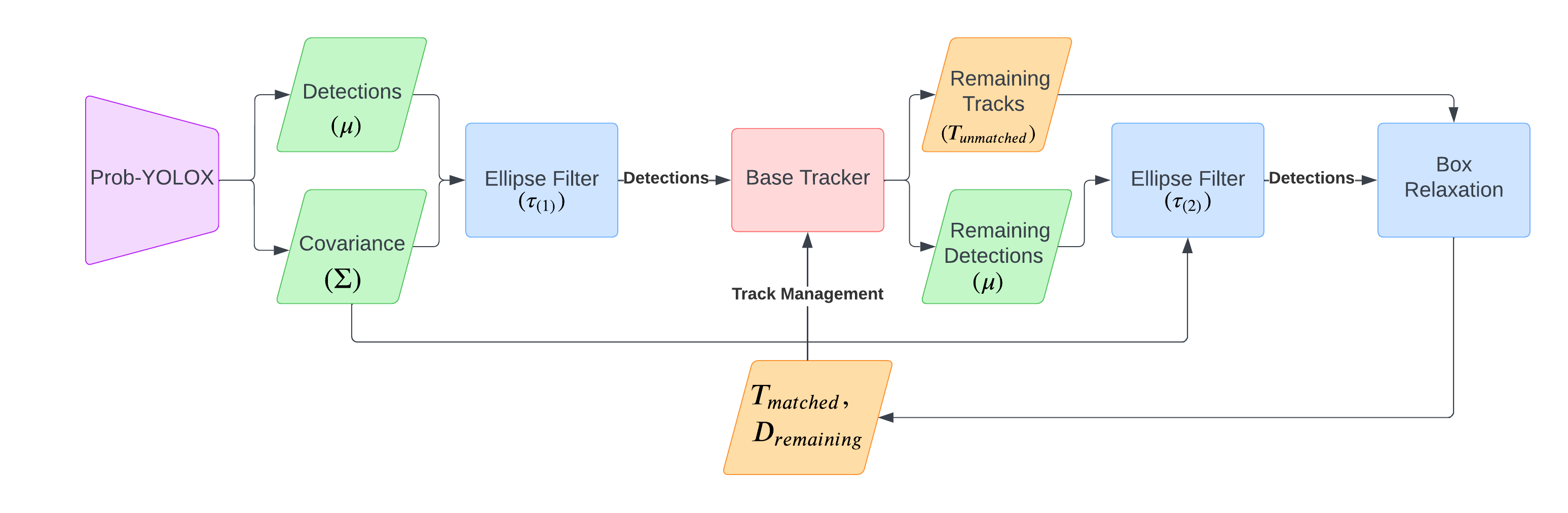
UncertaintyTrack: Exploiting Detection and Localization Uncertainty in Multi-Object Tracking
Chang Won Lee, Steven L. Waslander
2024 IEEE International Conference on Robotics and Automation (ICRA)
Paper •
Code
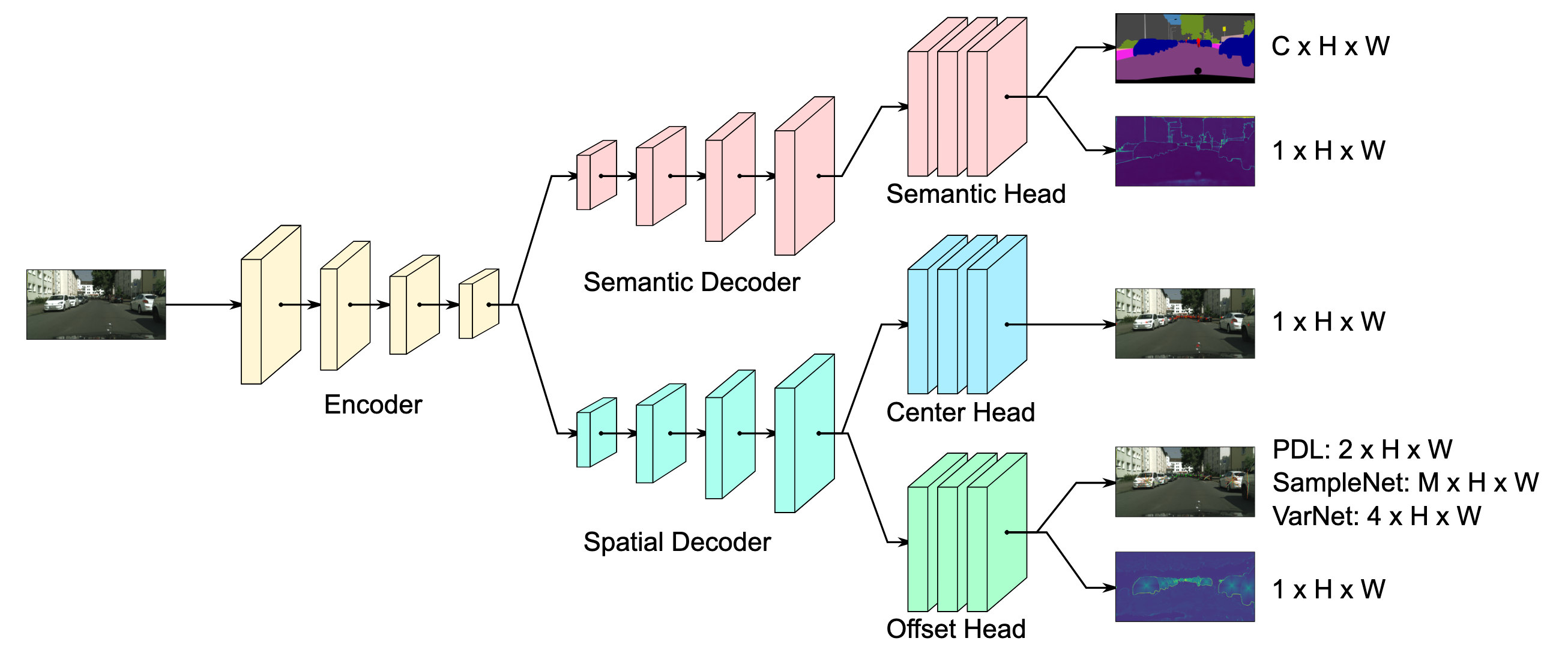
ProPanDL: A Modular Architecture for Uncertainty-Aware Panoptic Segmentation
Jacob Deery, Chang Won Lee, Steven Waslander
2023 20th Conference on Robots and Vision (CRV)
Paper
2024
Teaching Assistant for Mathematics for Robotics (ROB310)2023
Teaching Assistant for Mathematics for Robotics (ROB310)2022
Teaching Assistant for Linear Algebra for Engineering (MAT188)
Software Engineer (General Member) at aUToronto (August 2021 - April 2023)
University of Toronto's self-driving car team.
Our team won all dynamic and static challenges at the SAE AutoDrive Challenge II in 2024.
2019 - 2022
University of Toronto Engineering Student Ambassador2020 - 2021
University of Toronto Engineering Student Mentor2021
Engineering Science Education Conference (ESEC) Web Designer & Organizer